Foundation in Robotics and Tech Startup Management
What will you learn in this course?
As a learner, you will walk away with a solid foundation in robotics, spanning locomotion, computer vision, autonomous navigation, and AI applications. You will have hands-on experience building robots, navigating and integrating hardware with advanced software frameworks like ROS and TensorFlow. Beyond technical knowledge, this course will help fosters innovative thinking , laying the groundwork for impactful contributions you may wish to explore via entrepreneurial ventures.
|
Key Themes
|
||
|
||
|
Study Time
|
||
|
||
|
Course Level
|
||
|
||
|
Course Start
|
||
|
|
||
|
Delivery Location
|
||
|
|
||
|
|
||
Learning Motivation
Kickstart your robotics journey with an exploration of Locomotion and Sensors and usage of AI algorithms —the building blocks of all robots. Learn how robots move, calculate motion paths, and use kinematics to solve real-world challenges. For instance, you would be able to appreciate how rovers in space missions use differential kinematics to seamlessly navigate complex environments.
Did you know AI on the edge enables drones to make split-second decisions in rescue missions, even with limited computational resources? You can read further about scenarios of network centric multi-drone co-operation models in the website of one of the leading Global Drone Solution provider Skydio. Dive into the AI on the Edge module to uncover how advanced algorithms and deep learning frameworks, like TensorFlow Lite, empower robots to think and adapt in real-time.

|
|
Skydio Drone Sensing in Night Time © Skydio, Inc
|
Key Learning Segments
- Robotics Basics
- Robot Locomotion, Motion Path Planning, Robot Kinematics (Differential Kinematics)
- Robot Sensors (for Perception, Localization, and Mapping)
- AI on the Edge
- Algorithmic approaches in Robotics
- Computation Constraints on the Edge
- AI usage patterns in Robotics
- Deep Learning Frameworks on the Edge (e.g., TensorFlow Lite)
Learning Motivation
Delve into Robot Operating System (ROS), the framework that powers millions of robots globally and also used in Space explorations. Through hands-on practice, you'll simulate robots in ROS environments like Gazebo and Rviz, building a deep understanding of ROS’s architecture and its pub-sub communication mechanism.
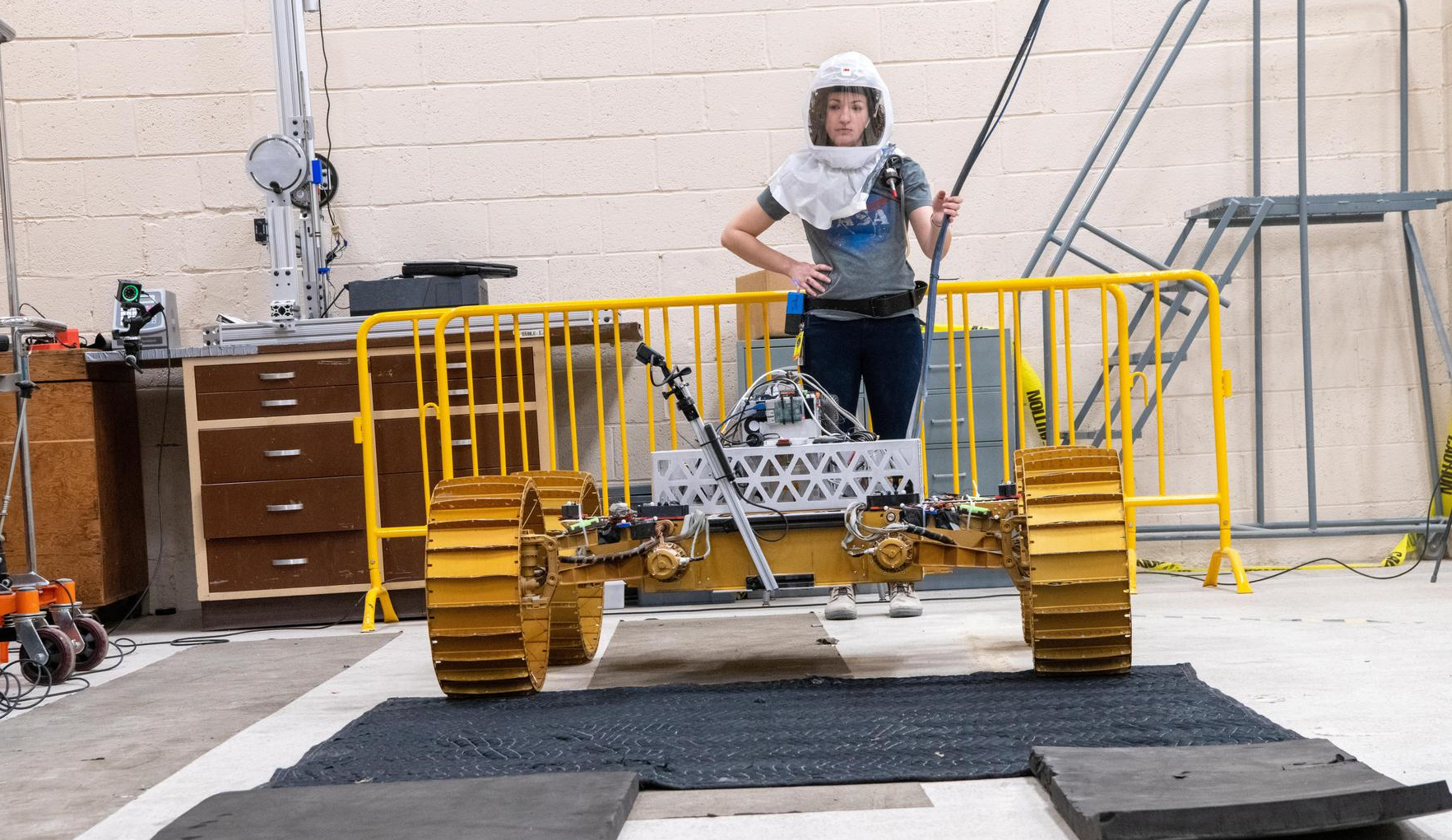
Space ROS is an open-source software framework, derived from ROS 2, is platform independent, portable, and project independent. Did you know, that the Space ROS project started with a joint agreement between Blue Origin and NASA. NASA has used ROS in its Robonaut 2 and Astrobee robots on the International Space Station, and was in preparatory stage for ROS2 usage at the ground node of the VIPER (Volatiles Investigating Polar Exploration Rover) mission. You can learn more here about Space ROS and find out about FAQs here
|
|
VIPER locomotion test for tough Lunar Polar Surface © NASA
|
Key Learning Segments
- Robotics 101 - Robot Operating System
- Software & Hardware Layers in a typical Robot
- ROS Evolution, ROS flavours (Space ROS)
- ROS Architecture, Pub-Sub Mechanism
- Build and Simulate Robot in ROS (Rviz, Gazebo, etc.)
- Building a Robot - Differential Drive
- Hardware and System Software Setup for a Basic Robot
- Construction of the Robot (Motor Drivers, Connection between Controller Circuit & Motor Driver)
- Program Robot Locomotion Logic based on Perception (Sensor Type)
Learning Motivation
Step into the world of robotic perception by learning the fundamentals of Computer Vision. Understand how robots perceive the world using tools like OpenCV and TensorFlow.
Challenges in Computer Vision as perception for Robots is multi-dimensional. For the best design vision solutions and algorithms, comparison with human interpretation of images is been long held as gold standard. We can infer from images - depth and patterns instantaneously. Image representation in computers are however an array of numbers, and Robots face the constraints of limited compute power and memory, to be able to process visuals in real time. While Neural Networks such as CNN, provide a layered approach to identification of objects, there is no single silver bullet for Visual perception for Robots. By utilizing AI techniques (such as artificial neural networks) for object detection, you'll get a feel of the opportunities and challenges in relation to Machine Vision application in Robotics.

|
|
Robot Visual Perception
|
Key Learning Segments
- Robotics 101 - Computer Vision Basics
- Computer Vision, Image Representation
- Artificial Neural Networks, TensorFlow, OpenCV
- Building a Robot - Computer Vision (applying AI)
- Camera Hardware and Software Setup
- Video Feed Capture and Processing
- Interfacing between Microprocessor and Hardware Components
Learning Motivation
Ever wondered how delivery bots navigate crowded city streets or Robots in unknown Territories like Mars apply principles of autonomous navigation (while being assisted by humans) ?
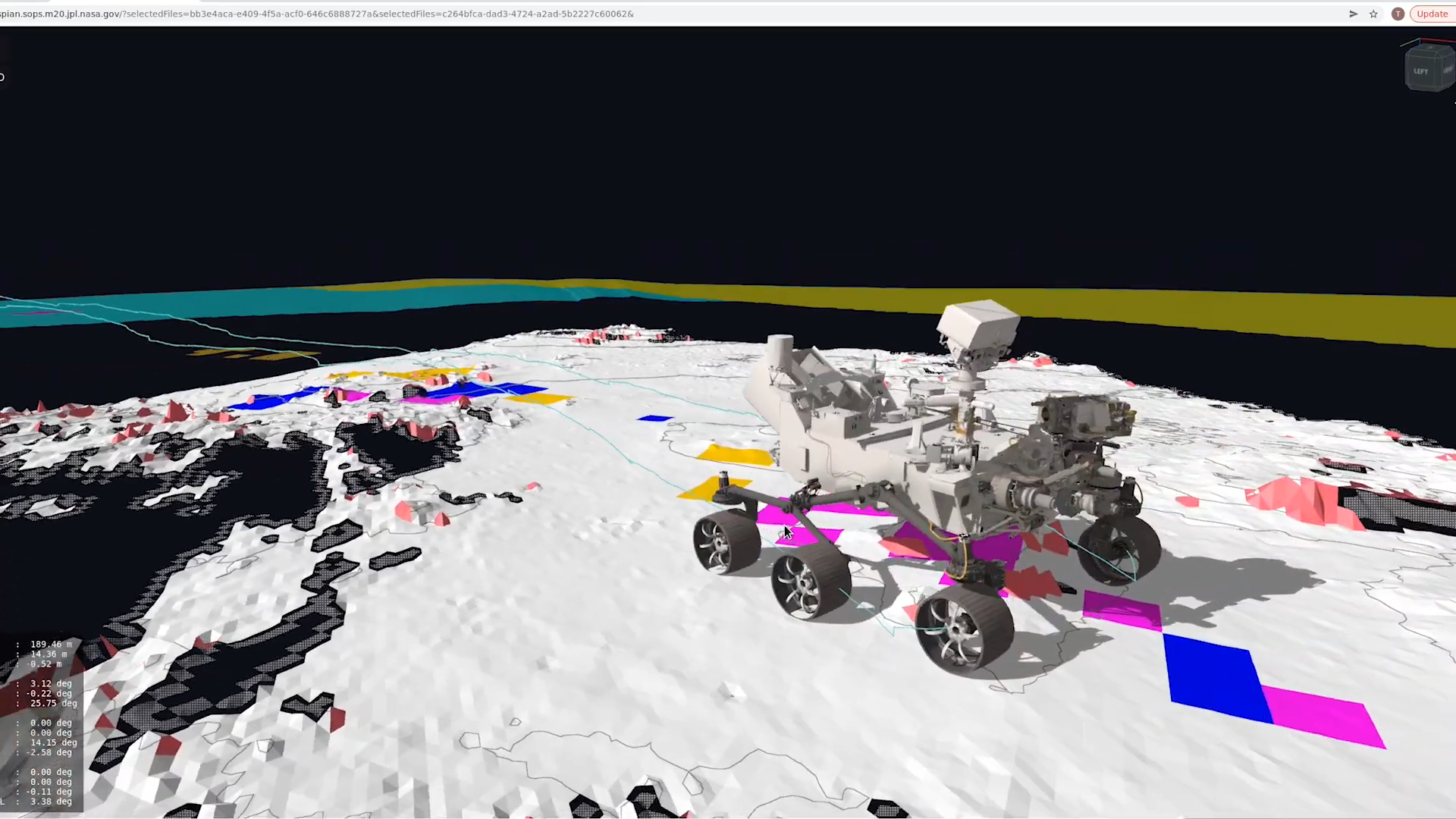
Mars Perseverance Rover, designed and operated by NASA, and researchers at Jet Propulsion Laboratory, Caltech is one such robotic marvel example, with multiple successful explorations in the rugged terrain of Mars, by utilising stereo imaging, while being on self-drive mode. Here is a quick snippet about Self-Driving capabilities of Perseverance Mars Rover and more details can be found at NASA website .
Learn in this segment, how robots find their way with Autonomous Navigation. Not knowing the location or map of a place, while exploring unknown territories, such as undersea or remote terrains on earth, planets like Mars, presents a signficant challenge for a Robot. You will explore various techniques to tackle such scenarions for Autonomous Navigation in Robots. Explore mapping techniques like topological maps, occupancy grids, and Octomap-voxels. Understand localization methods like Markov and Global Localization to see how it all comes together.
|
|
Mars Perseverance Rover © NASA, JPL-Caltech
|
Key Learning Segments
- Robotics 101 - Autonomous Navigation
- Mapping in Robots: Topological Maps, Occupancy Grids, Octomap-Voxels
- Localization in Robots (with Known Maps): Markov Localization, Global Localization
- Simultaneous Localization and Mapping (SLAM)
- SLAM Techniques: LiDAR SLAM, Visual SLAM
- Building a Robot - Autonomous Navigation
- Navigation Stack in ROS
- System Configuration for:
- LiDAR-based SLAM
- Visual SLAM using Depth Cameras
Learning Motivation
In the final segment of your learning, step into the world of entrepreneurship with Tech Startup Know-How. Understand the challenges and opportunities of launching a tech startup, and equip yourself with the skills to design, pitch, and scale your ideas.
As we progress towards knowledge economy, critical and emerging technologies will become more dominant and replace the traditional value propositions and alter value chains in most disruptive ways, that we have experienced earlier.
Dive deep into startup strategies, leveraging funding options, and overcoming market entry barriers in a knowledge economy. Develop critical thinking and leadership skills to steer your innovative ideas toward success, and be able to manage Global Teams and Technology Value Chains successfully.

|
|
Tech Entrepreneurship in Knowledge Economy
|
Key Learning Segments
- Tech Startup Essentials
- How to craft a compelling pitch
- Understanding funding options (e.g., angel investors, venture capital)
- Market entry strategies for tech products
- Building a Scalable Tech Startup
- Team-building strategies for early-stage startups
- Product lifecycle and agile development techniques
- Digital Marketing and Customer Insights
- De-risking Technology Value Chains
Domain Experts
This course is designed and delivered by Cogniifuturis.

- MBA (City University,UK)
- Academic Director, Cogniifuturis
- 40+ years in Industry
Martin is a graduate of City University Business School, London (now Bayes Business School). Since graduating in 1980, he has worked in many countries around the world in IT, Sales, Strategy, Marketing, Finance, and related areas. Martin is Academic Director at Congniifuturis. Martin also manages online Masters programme (London Graduate School) for international students across 30 countries and professional courses on Starting Up in Business and Fundamental Digital Marketing for City, University of London.
Dr. Roy has spearheaded several large-scale projects, delivering efficient and scalable systems for enterprise clients, focused on Big Data and AI solutions, spread across various sectors such as Finance, Insurance, Aviation, Media, Retail, Education. He also has lead qualification development for Awarding Organisations adhering to the UK vocatonal education framework regulated by Ofqual. A component of his PhD was about design of large scale AI models, and he has taught AI related subjects to graduate programmes in the UK. He is passionate about Space Robotics and is contemplating his second PhD in this arena.
- PhD, Msc (IT), MBA (IT)
- Technical Director, Cogniifuturis
- 20+ Years in Industry
